 自动驾驶激光雷达“线”越多就越好吗?
自动驾驶激光雷达“线”越多就越好吗?

[首发于智驾最前沿微信公众号]对于自动驾驶激光雷达的分类,有一个非常关键的参数,那就是“线”,之前和大家聊过自动驾驶激光雷达“线”的含义,对于激光雷达的线,“128线”“256线”之类的参数屡见不鲜,线数越高就意味着更强大的感知能力。那在自动驾驶中,搭载“线”越多的激光雷达就代表越好吗?
先说结论,其实线数不过是激光雷达性能指标体系中的一个维度,它与测距精度、扫描架构、算法设计、电气与热管理、整车成本乃至法规合规性紧密耦合,远非简单的“多即好”。
所谓“线”,指的是激光雷达在垂直方向上排布的离散激光束数量。以机械旋转激光雷达为例,发射模块将若干束窄脉冲激光按照固定俯仰角打向外界,再借助旋转机构在水平方向做360°扫描,于是每条束便在一圈内形成一条螺旋扫描轨迹。线数越多,意味着俯仰方向的离散角度越密集,点云在竖直方向的分辨率越高,俯仰视场(VerticalFieldofView,VFOV)通常也会随之扩大。对于MEMS或棱镜摆动式的固态激光雷达,虽然没有机械旋转机构,俯仰方向仍通过内部光学阵列排布固定角度的多束激光,线数概念同样成立。因而,无论机械旋转还是固态,线数的本质都是垂直角度抽样密度,它决定了一帧点云中在竖直方向可捕获的轮廓细节量级。
在感知算法层面,线数增加首先带来的是单帧点云密度提升。点云密度直接影响障碍物形态还原能力,尤其对截面狭小或远距离目标,点云密度的提升代表着可以探测到更多的细节。当俯仰离散角度缩小后,低矮路缘、倒地行人与散落杂物等原本位于“空洞”中的像素会被新激光束覆盖,使卷积或Transformer网络无需过度插值便能获得连贯几何信息。其次,VFOV扩展意味着同一时间窗内,传感器能够同时感知道路表面与高位结构,如匝道、立交桥底部或路口高悬的标志牌都可以感知到,从而减少盲区与漏检风险。对于如城市NOA、Robotaxi运营平台及高精地图实时重定位场景中等高等级自动驾驶功能,高线数所带来的细节不仅提升障碍物检测精度,也降低空间语义分割误差,进而增强整车在复杂三维环境中的纵横向决策鲁棒性。
对于感知系统来说,激光雷达线束的提升可以有效提升感知效果,但从整车系统视角审视,线数提升会牵一发而动全身。首先是硬件成本。无论采用分立管脚方案还是光子芯片集成,线数翻倍意味着发射阵列、接收器件、放大及解调电路同步扩容;高线数固态方案虽在尺寸上占优,却需多模小型化封装与复杂的光纤配向工艺,良率与一致性要求更严苛,因此在量产阶段价格攀升显著。其次是功耗与热管理文同。更多激光束意味着更高脉冲重复频率和峰值电流,器件发热量随之倍增,需要更大面积的散热器或主动风扇;对于48?V前装供电网络而言,多颗高线数雷达同时工作或将逼近保险丝上限,触发整车功耗调度问题。再者,数据带宽也成瓶颈。当点云数量从每秒二十余万飙升至百万级,千兆以太网、车内PCIe总线、SoCI/O通道以及DDR带宽皆可能淤塞;可见,不经筛选地把所有点云交给算法端处理,往往迫使主控计算平台升级,从而进一步抬高整车BOM。
更隐性的代价发生在算法侧。3D目标检测与语义分割多采用稀疏卷积、体素投影抑或基于邻域聚类的Transformer结构,其时间复杂度呈近线性增长;当输入点数翻倍,推理时延与显存开销亦水涨船高。为了维持量产车普遍要求的100?ms级闭环延迟,工程师往往被迫在算法前端下采样或随机丢点,这无异于用软件手段把硬件增加的线数“抵消”掉一部分,收益出现趋缓。
此外,多线数也会提高电磁与光学串扰风险。激光雷达通常工作在905?nm或1550?nm波段,当车队中存在多台同型号高线数雷达同时发射脉冲时,不同车辆之间的时间片冲突概率上升,若没有随机时分复用、频分编码或调制多样化方案,感知结果易被误触发。角度分辨率亦非只由线数决定,水平扫描速度、脉冲发散角与探测距离耦合度同样重要。若在竖直方向密采样而忽视水平轴精度,高速场景中的远距目标依旧可能出现点云稀疏。
将视角拉回功能需求,不同级别自动驾驶系统对线数的敏感度并不一致。对于侧重横向维度保持与纵向跟驰的高速L2场景,目标物以车辆、护栏为主,相对高度差小,32?线或64?线即可覆盖±10°-15°的俯仰视场;此时进一步增加线数的经济收益有限,系统工程团队更关注功耗与成本。城市L3功能面对交通标志杆、行人、多层立交与低速动态目标组合,128?线及以上带来的高密度点云能明显降低漏检率,然而如果摄像头与毫米波雷达在融合架构中承担了部分纵向与速度维度的感知责任,则可以用中高线数加多传感器融合的方式平衡预算。至于Robotaxi及末端配送车型,因为其商业模型依赖长时段运营和远程监管,对感知冗余与安全边际要求极高,顶置两到三颗128?线以上雷达在成本账本里仍然合理。但同样的方案一旦平移到私家车市场,消费者对售价及后期维护的敏感度会让车企重新思考“堆料”的合理性。
针对稀疏到稠密的点云梯度,不同算法策略对输入规模的容忍度差异巨大。基于体素化的稀疏卷积网络通常在低密度区间就能达到瓶颈精度,往上加点云收益迅速递减;而基于原始点云的完全图网络虽然对密度更敏感,但在工程实践中往往因为显存消耗与实时性约束被限速。近期流行的BEV(Bird’s?EyeView)投影方法把点云按高度层投影到二维平面,分辨率阈值约在每像素十余点。超过此阈,增加线数带来的新特征大概率落入已有像素格,信息增量趋近零。这意味着在给定算力预算下,如何通过动态体素尺寸、自适应采样与特定ROI精化策略把有限线数用在关键区域,比无差别堆砌线数来得划算。
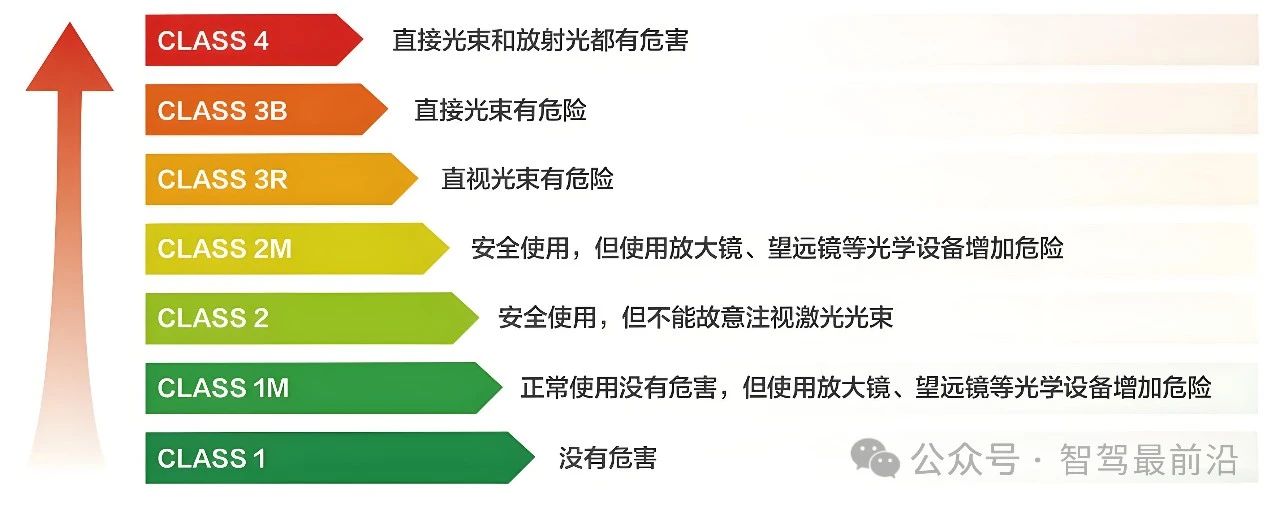
从产品生命周期看,线数提升也扩大了标定难度与维护成本。多通道系统需要更精细的外参标定,机械磨损或热胀冷缩导致的微小位姿偏移会让多线束之间产生内部错位,需要更高频次的在位自校。光学窗口污损、透镜镀膜衰减对高线数雷达尤为敏感,因为每束的发射功率相对低,为了保持同等信噪比,硬件常用提高脉冲重复率的方法弥补能量,进一步加剧热设计压力。高线数更意味着单位时间内激光脉冲次数增加,需要严格满足IEC?60825眼安全标准;当同车多雷达工作时,累计辐射值的叠加也必须进入OEM的危险源评估清单。对于追求全球市场的车型,还要面对欧盟、北美与东亚不同的激光辐射限值与申报流程。
正因线数升级存在边际收益递减与系统代价飙升,行业开始转向其他维度优化。波长升级是主流路线之一,1550?nm波段在眼安全阈值下能输出更高峰值功率,于是在同等线数条件下达到更远探测距离;同时1550?nm光束对大气散射衰减更低,在雨雾环境下保持点云密度。另一条思路是采用频率调制连续波(FMCW)架构,在单束中直接测得多普勒速度信息,使得中等线数雷达亦能通过联合距离?速度特征过滤虚警。再有面阵Flash方案,以二维SPAD阵列一次曝光、一次采集完成整幅深度图,用像素级并行取代线阵旋转,避免了复杂的机械与散热架构;目前点数虽不及高线机械雷达,但在低速泊车到城市L3区间已展现成本优势。所有这些创新的共同目标,是在硬件投入、系统算力与感知精度之间寻找“最优亚稳态”,而不是简单堆叠线数。
对于一款计划三到五年生命周期的量产车型,如何确定合适的线数,需要一个从需求工程到成本工厂的闭环评估。第一步是功能拆解,明确高速巡航、城市NOA、自动泊车乃至L4短时无人驾驶等目标功能的优先级与安全等级。第二步评估整车算力与电子电气架构,判断现有ECU带宽、功率储备是否承接更高密度点云的传输与推理。第三步结合车体安装位置与造型约束,顶置可360°环视,但对风阻与整车高度影响显著;翼子板嵌入或前格栅隐藏则需更宽VFOV抵消遮挡。第四步做供应链与量产可行性分析,高线数固态方案往往处于爬坡阶段,交付良率、备件成本与售后服务能力都需验证。最后,以总拥有成本(TotalCostofOwnership)为基准,把硬件价格、软件开发、标定调试、长期维护及云端数据存储综合折算,确保选定线数在商业模式中具备正向收益空间。
线数无疑是激光雷达最直观、也最容易被市场营销放大的参数。它确实能在感知上带来更丰富的垂直信息,帮助算法捕捉微小目标与复杂结构。然而,在自动驾驶越来越走向量产落地的当下,必须把“点云精度”放进庞大的系统权衡矩阵:硬件成本、功率与热设计、数据链路、算法时延、法规合规、维护运维乃至消费者支付意愿,没有哪个因素可以被忽视。超过特定阈值之后,线数的边际效益迅速下降,甚至可能引发功耗过载、算力瓶颈与法规风险等连锁问题。
与其盲目堆料,不如把资源投入更高功率、更长波长、更智能的抗干扰调制,以及在算法侧做自适应采样和多传感器深度融合。只有当硬件线数、系统算力与软件算法达到动态平衡,激光雷达才能真正成为“自动驾驶第三只眼”而非昂贵负担;也只有在这样的平衡中,每一束激光才能物尽其用,让车辆在真实道路上更安全、更高效地运行。
审核编辑 黄宇
-
激光雷达
+关注
关注
972文章
4244浏览量
193261 -
自动驾驶
+关注
关注
790文章
14380浏览量
171314
发布评论请先 登录
从自动驾驶到具身智能,激光雷达缘何一边被嫌弃,一边被追捧?
自动驾驶只用激光雷达进行感知会有哪些问题?
自动驾驶激光雷达中常说的“线”是个啥?
自动驾驶激光雷达之间会相互干扰吗?
激光雷达在自动驾驶领域中的优势

激光雷达在自动驾驶中为何不可替代?

自动驾驶激光雷达:原理、类型与应用梳理

爱普生高精度车规晶振助力激光雷达自动驾驶

自动驾驶中的激光雷达是否会伤害人眼?
激光雷达技术:自动驾驶的应用与发展趋势

激光雷达是自动驾驶走的一段弯路吗?
禾赛激光雷达助力宝马智能工厂自动驾驶
激光雷达光电组件的AEC-Q102认证:保障自动驾驶硬件的可靠性与品质



 工商网监
工商网监
评论